Student Unmanned Aerial Systems Competition - Computer Vision

The University of Hawaii Drone Technologies(UHDT) is a Vertically Integrated Project(VIP) which is a multidisciplinary team consisting of mechanical, electrical, and computer engineers. The Student Unmanned Aerial Systems Competition(SUAS) is an annual competition hosted by the Association for Unmanned Vehicle Systems International(AUVSI). In this competition, drones are tasked with autonomously navigating a course and completing a series of tasks. The tasks include autonomously traversing a series of waypoints, identifying and locating targets, and dropping payloads cooresponding to each target. This is done as a simulated mission of package delivery to a remote location.

For this project, our team was split up into several subsystems each assigned to different ascpects of the drone system. I was the lead of the Image Proccesing subsystem. My subsystem was tasked with creating an autonomous system to identify and locate targets on the ground using the drone’s camera. This was done using a combination of computer vision and machine learning.
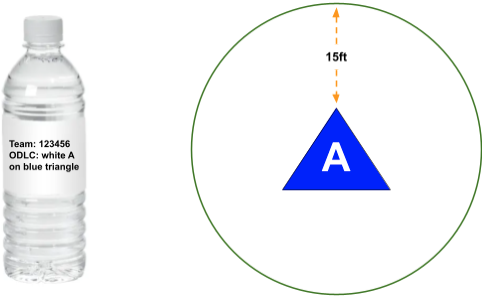
The payload is a water bottle with a description of the target on it’s label. These bottles must be dropped on the coorsponding target within a 15 feet radius. Targets are characterized by their shape, color of the shape, alphanumeric, and color of the alphanumeric. This is accomplished with a combination of object detection, shape recognition, color recognition, and alphanumeric recognition algorithms. The object detection and shape recognition algorithms are made using YOLOv5, a common machine vision library. Color recognition was made using the K-means clustering, a data analyzation technique. Alphanumeric recognition was made using the Tesseract OCR library. These algorithms were trained on a custom artificial dataset we made using a Python script, the script was also made to generate a label file for each image. A script then is used to take the results of the algorithms combined with drone sensor data embedded into the image to determine the location of the target as GPS coordinates. A final script uses the results of the previous script to create a waypoint file for the drone to follow to drop the payloads.
Here is the main file that initializes all the algorithms:
import os
import cv2
from PIL import Image
import time
from ColorRec import color_rec_large as CRL
from AlphanumRec import image2textConf as AR
from ObjectDetection import ObjectDetection
from ObjectDetection import class_to_shape
import TargetClass
from metadataExtractor2 import extractMetadata as dataExtract
from payloadDelivery import deliveryScript as deliveryScript
from Geotag import geotag as geotag
from Geotag import haversine as distance
from Close_Enough_Test_Cases_Test import order_payloads as match
#Payload 1 Info
dock1 = 9
shape1 = "HEXAGON"
shapeColor1 = "GREEN"
alphanumColor1 = "YELLOW"
alphanum1 = "7"
#Payload 2 Info
dock2 = 10
shape2 = "RECTANGLE"
shapeColor2 = "WHITE"
alphanumColor2 = "YELLOW"
alphanum2 = "P"
#Payload 3 Info
dock3 = 11
shape3 = "CIRCLE"
shapeColor3 = "BROWN"
alphanumColor3 = "ORANGE"
alphanum3 = "3"
#Payload 4 Info
dock4 = 12
shape4 = "OCTAGON"
shapeColor4 = "RED"
alphanumColor4 = "ORANGE"
alphanum4 = "T"
#Payload 5 Info
dock5 = 13
shape5 = "CIRCLE"
shapeColor5 = "PURPLE"
alphanumColor5 = "GRAY"
alphanum5 = "T"
pic_count = 27
count = 0
targetList = []
payloadlist = []
imagelist = []
path = 'watchdog'
trash = 'old'
config = {
'image_width': 6000,
'image_height': 4000,
'resolution': 3.91e-9
}
for x in range(0, pic_count+1):
imagelist.append(f'image{x}.jpg')
def watch_directory():
count = 0
print("File Watcher Initiated")
while (len(targetList) < 4) and (count < pic_count):
for filename in os.listdir(path):
if len(os.listdir(path)) > 1 and (filename in imagelist):
if filename.endswith(".jpg") or filename.endswith(".jpeg") or filename.endswith(".png"):
full_path = os.path.join(path, filename)
# Wait until the file is fully created
while True:
if os.path.exists(full_path) and os.path.getsize(full_path) > 0:
break
time.sleep(1)
# Process the image file
ODCL(full_path)
# Delete the image file
os.remove(full_path)
count +=1
time.sleep(1) # Check directory every __ seconds
if(len(targetList) >= 4) or (count >=pic_count):
matched_list = match(payloadlist, targetList)
deliveryScript(targetList, matched_list)
def ODCL(source):
start_time = time.time()
image = Image.open(f'{source}')
#Object Detection and Shape Recogntion Function Call
pitch, yaw, roll, latitude, longitude, altitude = dataExtract(source)
metadata = [pitch, yaw, roll, latitude, longitude, altitude]
results, bboxes = ObjectDetection(image)
for bbox in bboxes:
#Get Bounding Box and Shape Classification of Found Target
x1, y1, x2, y2, conf, type = bbox
x1, y1, x2, y2 = int(x1), int(y1), int(x2), int(y2)
target_area = (x1+x2)*(y1+y2)
if target_area > 82000:
#Geotag Target
xMid,yMid = (x1+x2)/2, (y1+y2)/2
latitude, longitude = geotag(config, metadata, xMid, yMid)
print(f"Lat:{latitude}, Long:{longitude}")
#Check if duplicate Target
if not targetList or all(abs(distance(target.latitude, target.longitude, latitude, longitude)) > 3 for target in targetList):
#Crop Target from Image
cropped = image.crop((x1,y1,x2,y2))
#cropped.show()
shape = class_to_shape(type)
print(shape)
#ColorRecLarge Function Call
alphanum_string, shape_string, filtered1, filtered2 = CRL(cropped)
print(shape_string)
print(alphanum_string)
#Alphanumeric Recognition Function Call
alphanum = ""
alphanum1, alphanum_conf1 = AR(filtered1)
alphanum2, alphanum_conf2 = AR(filtered2)
if alphanum_conf1 > alphanum_conf2:
alphanum = alphanum1
else:
alphanum = alphanum2
print(alphanum)
NewTarget = TargetClass.Target(shape, latitude, longitude, shape_string, alphanum_string, alphanum)
targetList.append(NewTarget)
end_time = time.time()
print(f"Runtime:",end_time - start_time)
payload1 = TargetClass.Payload(dock1, shape1.upper(), shapeColor1.upper(), alphanumColor1.upper(), alphanum1.upper()); payloadlist.append(payload1); print("Payload 1 Added")
payload2 = TargetClass.Payload(dock2, shape2.upper(), shapeColor2.upper(), alphanumColor2.upper(), alphanum2.upper()); payloadlist.append(payload2); print("Payload 2 Added")
payload3 = TargetClass.Payload(dock3, shape3.upper(), shapeColor3.upper(), alphanumColor3.upper(), alphanum3.upper()); payloadlist.append(payload3); print("Payload 3 Added")
payload4 = TargetClass.Payload(dock4, shape4.upper(), shapeColor4.upper(), alphanumColor4.upper(), alphanum4.upper()); payloadlist.append(payload4); print("Payload 4 Added")
payload5 = TargetClass.Payload(dock5, shape5.upper(), shapeColor5.upper(), alphanumColor5.upper(), alphanum5.upper()); payloadlist.append(payload5); print("Payload 5 Added")
watch_directory()
The full code can be found here: UHDT-ODCL